Comparative Analysis of Djikstra’s and A* Algorithms
Yousif Murrani
Introduction
Have you ever wondered how your GPS knows the exact quickest directions to get you to your destination or how a video game enemy will always move exactly towards you no matter what’s in their way? It’s all thanks to pathfinding algorithms. Pathfinding algorithms are crucial in today's world, whether it’s to get you to work on time or to optimize your code. In this article, we’ll dive into the two biggest powerhouses of the pathfinding world: Dijkstra’s and the A* Algorithms.
We will start off with Dijkstra’s algorithm and explore its core concepts as well as its limitations. Then, we will look at the more modern approach of the A* algorithm and see where it might be the better approach.
In this blog, we will take an in-depth look at Dijkstra’s algorithm, providing pseudocode and some examples then we will do the same for A*. In the examples, we’ll test out both algorithms in scenarios of different difficulty for the algorithms to figure out and see how long it takes each one to complete the task. Afterward, we’ll compare the two in terms of efficiency so that you know which to use in each scenario.
Dijkstra’s Algorithm
Overview
One of the most popular pathfinding algorithms in the world is Dijkstra’s algorithm, published by Edsger W. Dijkstra in 1959 [1]. The algorithm was designed to find the shortest path between a given node and every other node in a positive-weighted graph, essentially making it a Greedy Algorithm (an algorithm designed to make the best possible choice at every step without considering the future result). It can also be classified as a Search Algorithm. The algorithm can also be changed to find the shortest path between any given starting node and a destination node then stopping. The data structures used within the code are usually a priority queue or a heap to optimize it.
Here is a Gif showing how Dijkstra's Algorithm Works in Real Time:
 [1]
[1]
Pseudocode
function dijkstra(G, S)
/// Initialize distance and previous arrays
for each vertex V in G
distance[V] <- infinite // Set initial distance to infinity
previous[V] <- NULL // Set previous vertex to NULL
If V != S, add V to Priority Queue Q // Add all vertices to the priority queue except the source
distance[S] <- 0 // Set distance from source to itself to 0, as it's the starting point
/// Main loop to find the shortest paths
while Q IS NOT EMPTY
U <- Extract MIN from Q // Extract vertex with minimum distance from the priority queue
for each unvisited neighbour V of U
tempDistance <- distance[U] + edge_weight(U, V) // Calculate the tentative distance
if tempDistance < distance[V]
distance[V] <- tempDistance // Update the distance
previous[V] <- U // Update the previous vertex for the current vertex V
/// Return the final distance and previous arrays
return distance[], previous[]
[10]
Time/Space Complexity
Time and Space Complexity are two very important concepts in the realm of Computer Science. Time Complexity refers to the amount of time an algorithm takes to run based on the amount of inputs (n). Space Complexity is similar, but refers to the amount of memory (space) allocated to run the code.
Here are the Time and Space complexities for Dijkstra's Algorithm:
Time Complexity: O((|V| + |E|) * log(V))
Space Complexity: O((|V| + |E|)) [3]
In the formulas, 'V' represents the number of Vertices (nodes) in the graph while 'E' represents the number of Edges (connections between nodes) in the weighted graph. Using these two numbers, we can calculate the Big-O notation of Dijkstra's Algorithm.
This is best shown in this graph:
 [4]
[4]
While it starts out very similar to an O(n) algorithm, we can see that it starts to curve upwards more rapidly near the end. This leads us to believe that its time complexity will be somewhere between O(nlog(n)) and O(n^2), as shown below:
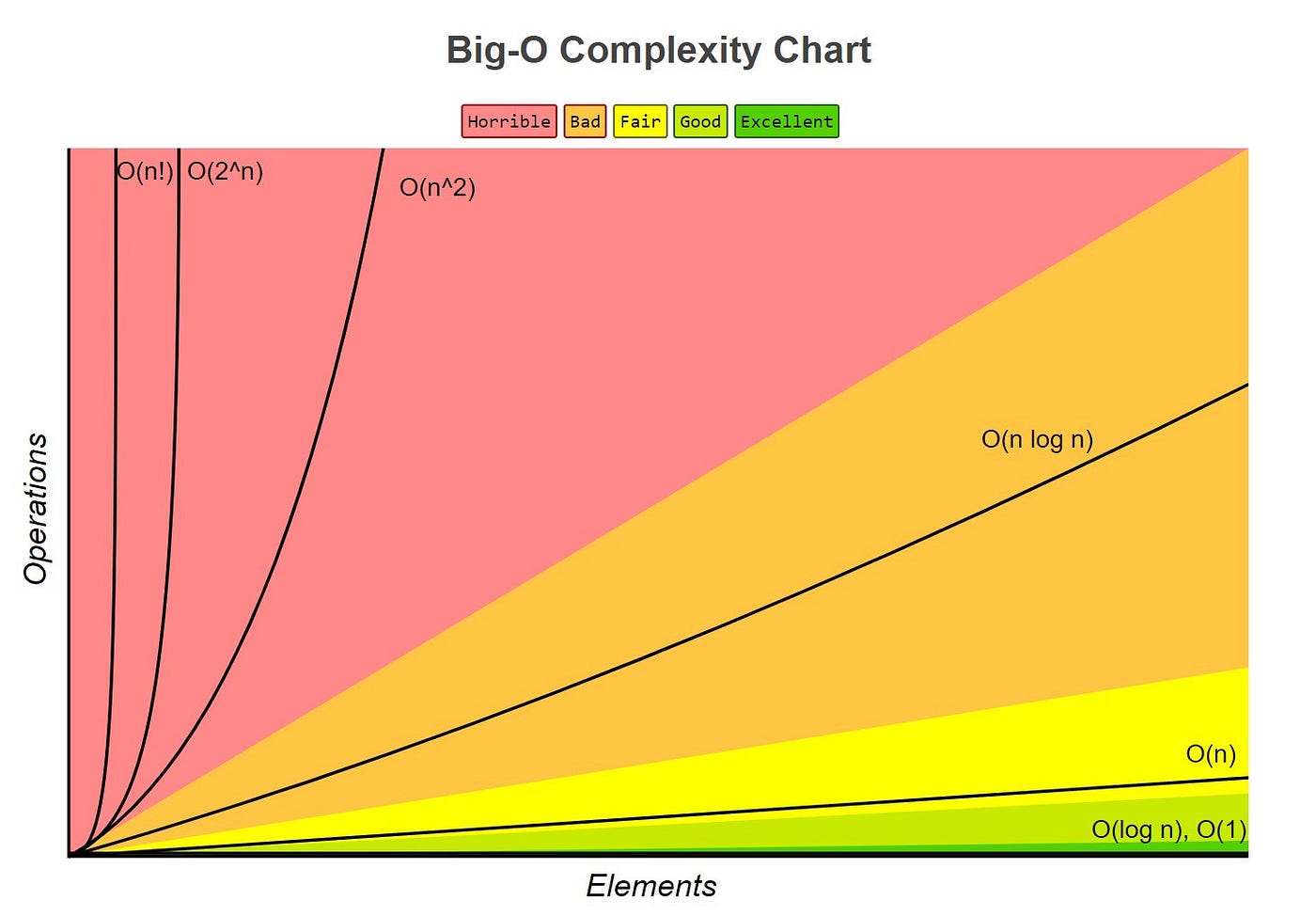 [6]
[6]
Applications
- Route Planning: Dijkstra's is used extensively in route planning and navigation systems, helping find the shortest path between locations and defining an accessible route between them.
- Network Packet Routing: One of the biggest use cases for the algorithm is helping find the shortest path between nodes so that routers can quickly send packets from a source to a destination.
- Pathfinding in Video Games: As mentioned earlier, many game developers also incorporate Dijkstra's in video games, allowing the game characters to navigate the maps they are a part of with efficiency. [2],[8]
A* Algorithm
Overview
The A (referred to as 'A-Star') Algorithm, like its predecessor Dijkstra's, is a very powerful pathfinding algorithm designed to find the shortest path between a starting node and a destination node. However, unlike Dijkstra's, the A is only a Search Algorithm and not a Greedy Algorithm. This is because A takes into consideration the overall result, and not just the best option at the current step. Another feature that sets A apart is its ability to use a heuristic, which is a function that can help it find the solution more quickly, albeit giving up some level of accuracy and precision [6]. This algorithm was actually created as a part of the Shakey Project, which was building a robot that could choose its own actions. However, it has since become popular in many different pathfinding uses [5].
Here is a quick showcase of the A* Algorithm working with four different heuristics:
 [5]
[5]
In the Gif, from left to right, the A* method is increasingly using a heuristic that prefers points that are closer to the goal. When not using a heuristic, the algorithm becomes extremely similar to Dijkstra's.
Pseudocode
make an openlist containing only the starting node
make an empty closed list
while (the destination node has not been reached):
consider the node with the lowest f score in the open list
if (this node is our destination node) :
we are finished
if not:
put the current node in the closed list and look at all of its neighbors
for (each neighbor of the current node):
if (neighbor has lower g value than current and is in the closed list) :
replace the neighbor with the new, lower, g value
current node is now the neighbors parent
else if (current g value is lower and this neighbor is in the open list ) :
replace the neighbor with the new, lower, g value
change the neighbors parent to our current node
else if this neighbor is not in both lists:
add it to the open list and set its g
[11]
Time/Space Complexity
The Time and space complexity of the A* Algorithm is dependent on the heuristic used for the algorithm. At best, it could be O(1), at worst it would have the time and space complexity of Dijkstra’s Algorithm. That means that depending on the heuristic implemented in the algorithm, the code will either run in constant time ( O(1) ), or it can take as long as Dijkstra's algorithm, O((|V| + |E|) * log(V)) [5].
Applications
- Robotics: A is used commonly in the Robotics field, helping robots navigate by finding optimal paths around obstacles. This is actually the first real-world application of A as it was created for the Shakey Project to help a robot navigate a room.
- Machine Learning: The algorithm is also used in Artificial Intelligence models to optimize decision-making in the system, leading to a faster and more efficient AI.
- Pathfinding in Video Games: Similar to Dijkstra's, A* is also great for providing a pathfinding method in many video games. Due to its ability to use heuristic, it also provides developers with the ability to have different levels of accuracy for the path the characters take. [9]
This video shows how A* works in a 2D grid by always trying to move towards its goal location:
https://www.youtube.com/watch?v=19h1g22hby8
Comparing the Two Algorithms
Key Features
While A and Dijkstra's are both very efficient pathfinding algorithms, they differ in their methods. Some key features of the A Algorithm are:
- Informed Search: As mentioned earlier, A* performs an informed search when finding the shortest path. This means that it keeps track of the cost from the current vertex to the goal vertex and bases its search off that.
- Heuristic: Using a good heuristic, A* can narrow its choices down so that it takes the fewest steps possible while still maintaining the correct path.
- G(n) and H(n) Values: To evaluate which node it should move to, A* sums the cost of the distance between the start node and the current node ( G(n) ) to the cost of the distance between the current node and goal node ( H(n) ).
These features allow A* to compete with Dijkstra's, who's key features include:
- Uninformed Search: Dijkstra's does not take into account the location of the goal node. This allows it to make the best decision at every step without worrying about the overall result and assuming that these desicions will lead to the optimal solution.
- Optimal Paths: Assuming that all the edges between the nodes are non-negative, Dijkstra's will find the shortesy path between the start node to every other node on the map.
- Total Exploration: Dijkstra's algorithm explores every vertex on the graph and finds the shortest path to all of them, including the goal vertex.
When To Use
Knowing when to use Dijkstra's Algorithm or the A* Algorithm is very important as it can change the speed of your code significantly.
Dijkstra's is the usually better choice when the graph is sparse, meaning that there are fewer vertices than edges, as it tends to perform better with fewer nodes. Another reason to use Dijkstra's is if you need to find the shortest path to all the other nodes in the graph and not just the goal node. Lastly, if a good heuristic is not available, it is safer to use Dijkstra's than to use A* with a bad heuristic.
However, if you do have a good heuristic function on hand, A is most definitely the go-to method. With a good heuristic, A can be much faster as it only focuses on reaching the goal node and not finding paths to every other node. This also leads A to work better in dense graphs with many nodes, as it gives the algorithm more options to reach the destination. Due to A exploring fewer nodes overall than Dijkstra's, A* uses less memory to reach the destination. This is very important if you have a constraint on the Space Complexity of your program.
Differences and Similarities
Dijkstra's and A* Algorithms are very similar to each other, which is why they are always debated on in terms of effectiveness and efficiency. There main similarities include:
- Main Objective: Both algorithms are used for pathfinding in graphs, mainly for finding the shortest path between a start node and a goal node.
- Weighted Graphs: The two algorithms are used on weighted graphs where each edge between two vertices has a specific numerical weight.
- Node Tracking: Both keep track of nodes that they have already visited to ensure that they don't accidentally re-visit the same node more than once.
- Priority Queue: A priority queue data structure is most commonly used in both algorithms to select a node for the next step.
While they are very similar, the two also have some major differences, the biggest ones being:
- Heuristic: The A* Algorithm's use of a heuristic function is one of the biggest differences. Dijkstra's does not rely on one when performing its search.
- Time/Space Complexity: Dijkstra's commonly has a greater time and space complexity than A* because of its need to search all the nodes in the graph. This is very obvious when dealing with a denser graph.
- Overall Completeness: Dijkstra's Algorithm will search through the entire graph and explore each of the nodes, while A* takes a more efficient approach and focuses only on the nodes that will help it reach its goal faster.
Efficiency Analysis
Why is Efficiency Important
Efficiency is one of, if not the most, important aspects of good code. Since some of these algorithms are used in essential and valuable operations, making sure the algorithm is capable of handling large amounts of data at a proficient speed is of the utmost importance.
Overall Efficiency of Each
Dijkstra's algorithm is most efficient when you have a small amount of nodes and a large amount of edges between those nodes. This type of graph, a sparse graph, allows Dijkstra's to work at its full potential. Dijkstra's is also the most efficient pathfinding algorithm if you don't know the location of your goal node. This is because Dijkstra's algorithm searches through all of its surrounding nodes until it finds the correct one. However, this does lead it to have a larger Time and Space Complexity.
A, on the other hand, works best when there is a large amount of nodes in the graph. This denser graph, put together wil a good heuristic function, allows A to find the goal node extremely fast. However, A* is very reliant on its heuristic function, meaning that if the heuristic is non-admissible, the algorithm will be ineffective and have a hard time finding the goal.
Visual Comparison
Here is a quick video showing the two different algorithms' pathfinding in real time:
https://www.youtube.com/watch?app=desktop&v=g024lzsknDo
As shown in the video, A tends to work much quicker than Dijkstra's when trying to find the goal node. This is due to Dijkstra's method of searching all the nodes around its current node before moving forward. However, this is not always the case. As shown at 1:30 in the video, Dijkstra's will actually work faster than A in some situations.
Conclusion
In the dynamic world of pathfinding algorithms, Dijkstra's Algorithm and the A* Algorithm emerge as the top two contenders, leaving all others in the dust. Both with unique strengths and applications, it is evident that their differences play vital roles in terms of what situation they would be most useful in.
Summary of Findings
Dijkstra's Algorithm, a pathfinding powerhouse since its creation in 1959, shows why it has stayed relevant in the ever-changing world of computer science because of its efficiency when it comes to positively weighted graphs. By performing an uninformed search, it is able to make the best decision at every step of the process and is guaranteed to find the shortest path if it exists.
Its modern competitor, the A Algorithm, shows off that an informed search, or knowing where the end goal is, can be just as good, if not better, than an uninformed search. A also introduces the concept of using a heuristic function to help lessen the burden of pathfinding. Equipped with a good heuristic, A* does not need to search all nodes in a graph like Dijkstra's, but instead moves directly to the goal in a very efficient manner.
Recommended Uses
While both have proven to be very useful algorithms, each has cases where it will clearly shine. In scenarios where the edges represent costs or distances, Dijkstra's is the more optimal option as exploring all the nodes in the graph is necessary. This algorithm will work even better if the graph is sparse. However, if the scenario calls for efficiency or there is a time constraint, the more modern A should be the go-to algorithm. With a powerful heuristic, A can reduce its time and space complexity to near-constant. This will also work especially well if the graph is very dense.
Possible Future Developments
As technology continues to grow and evolve, the field of pathfinding algorithms will also grow alongside it. In the future, a more evolved heuristic may be created that will allow A to work in all sorts of graphs, dense or sparse. Advancements in parallel processing may also help advance Dijkstra's Algorithm, allowing it to handle large sets of data in a more efficient manner. Another possibility is that in the coming years, we will see a new pathfinding algorithm rise, one that will incorporate all the advantages of A and Dijkstra's without any of the disadvantages.
In conclusion, the choice between using Dijkstra's Algorithm or the A* Algorithm depends entirely on the situation that the algorithm is being incorporated into. There is no one-size-fits-all solution, but these two algorithms can be used most effectively if they are integrated into the correct scenario. Despite both being around for many years, they are still invaluable tools that every programmer should know how to use to optimize pathfinding, whether it's for networks, creating video games, or just for fun.
References
[1] “Dijkstra’s Algorithm.” Wikipedia, Wikimedia Foundation, 6 Nov. 2023, https://en.wikipedia.org/wiki/Dijkstra%27s_algorithm.
[2] Bhadaniya, Shivali. “Dijkstra’s Algorithm in C++: Shortest Path Algorithm.” FavTutor, 20 May 2021, https://favtutor.com/blogs/dijkstras-algorithm-cpp.
[3] “Educative Answers - Trusted Answers to Developer Questions.” Educative, www.educative.io/answers/how-to-implement-dijkstras-algorithm-in-cpp. Accessed 19 Nov. 2023.
[4] Woltmann, Sven. “Dijkstra’s Algorithm (with Java Examples).” HappyCoders.Eu, HappyCoders.eu, 25 Nov. 2020, www.happycoders.eu/algorithms/dijkstras-algorithm-java/.
[5] “A Search Algorithm.” Wikipedia, Wikimedia Foundation, 13 Oct. 2023, https://en.wikipedia.org/wiki/A_search_algorithm.
[6] Olawanle, Joel. “Big O Cheat Sheet – Time Complexity Chart.” freeCodeCamp.Org, freeCodeCamp.org, 25 Oct. 2022, www.freecodecamp.org/news/big-o-cheat-sheet-time-complexity-chart/.
[7] “A* Search Algorithm.” GeeksforGeeks, GeeksforGeeks, 8 Mar. 2023, www.geeksforgeeks.org/a-search-algorithm/.
[8] Bhattacharyya, Soumalya. “How Is Dijkstra’s Algorithm Used in the Real World?” Analytics Steps, 11 Sept. 2023, www.analyticssteps.com/blogs/how-dijkstras-algorithm-used-real-world.
[9] S, Ravikiran A. “A* Algorithm Concepts and Implementation.” Simplilearn.Com, Simplilearn, 17 Oct. 2023, www.simplilearn.com/tutorials/artificial-intelligence-tutorial/a-star-algorithm.
[10] “Dijkstra’s Algorithm.” Programiz, www.programiz.com/dsa/dijkstra-algorithm. Accessed 19 Nov. 2023.
[11] "A* Search" Brilliant.org. Retrieved 19:35, November 19, 2023, from https://brilliant.org/wiki/a-star-search/